3DV 2020
Towards a MEMS-based Adaptive LIDAR
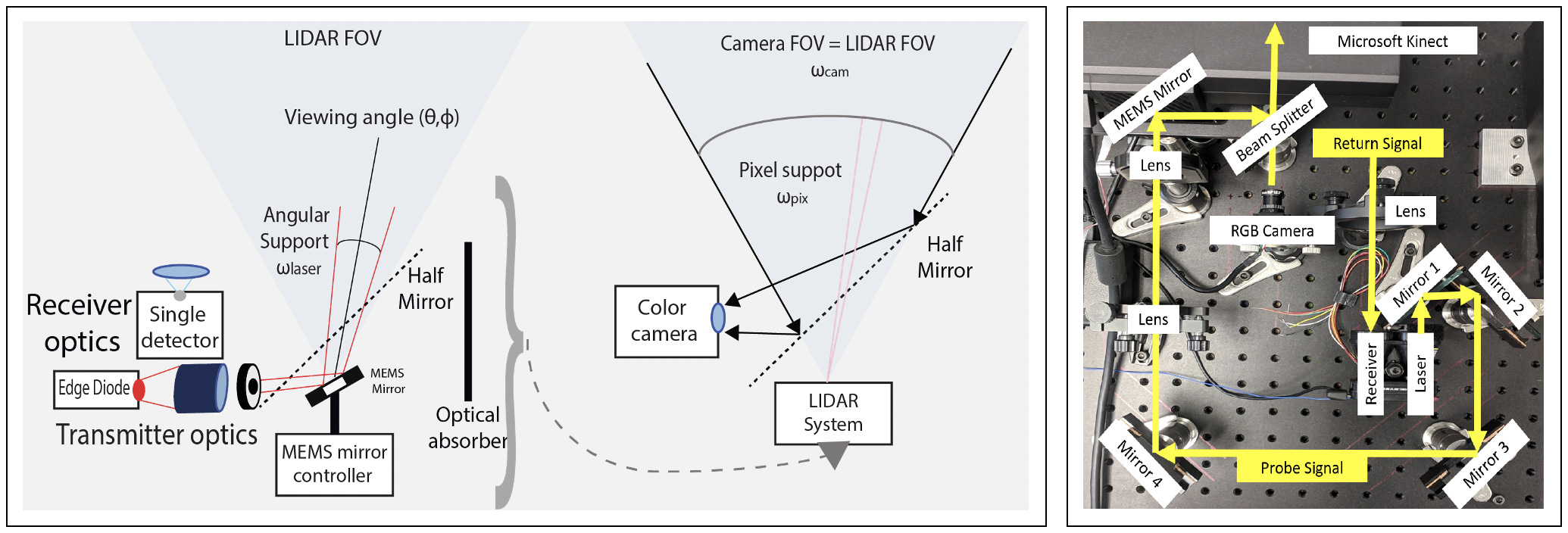
Adaptive LIDAR Design -- We have designed a flexible MEMS mirror-modulated scanning LIDAR. We co-locate this directionally controllable LIDAR with a color camera, allowing for deep depth completion of the sparse LIDAR measurements. We show a ray diagram of our design (left) and a picture of the hardware setup (right) above. The long optical path in the hardware setup is simply an artifact of having a single circuit board for both the LIDAR receiver and transmitter.
Abstract
Unlike most artificial sensors, animal eyes foveate, or distribute resolution where it is needed. This is computationally efficient, since neuronal resources are concentrated on regions of interest. Similarly, we believe that an adaptive LIDAR would be useful on resource constrained small platforms, such as micro-UAVs. We present a proof-of-concept LIDAR design that allows adaptive real-time measurements according to dynamically specified measurement patterns. We describe our optical setup and calibration, which enables fast sparse depth measurements using a scanning MEMS (micro-electro-mechanical) mirror. We validate the efficacy of our prototype LIDAR design by testing on over 75 static and dynamic scenes spanning a range of environments. We show CNN-based depth-map completion experiments which demonstrate that our sensor can realize adaptive depth sensing for dynamic scenes.
Cite
@article{pittaluga2020lidar,
title={Towards a MEMS-based Adaptive LIDAR},
author={Pittaluga, Francesco and Tasneem, Zaid and Folden, Justin and Tilmon, Brevin and Chakrabarti, Ayan and Koppal, Sanjeev J},
journal={arXiv preprint arXiv:2003.09545},
year={2020}
}